Un axe de recherche & création du groupe Reflective Interaction d’EnsadLab
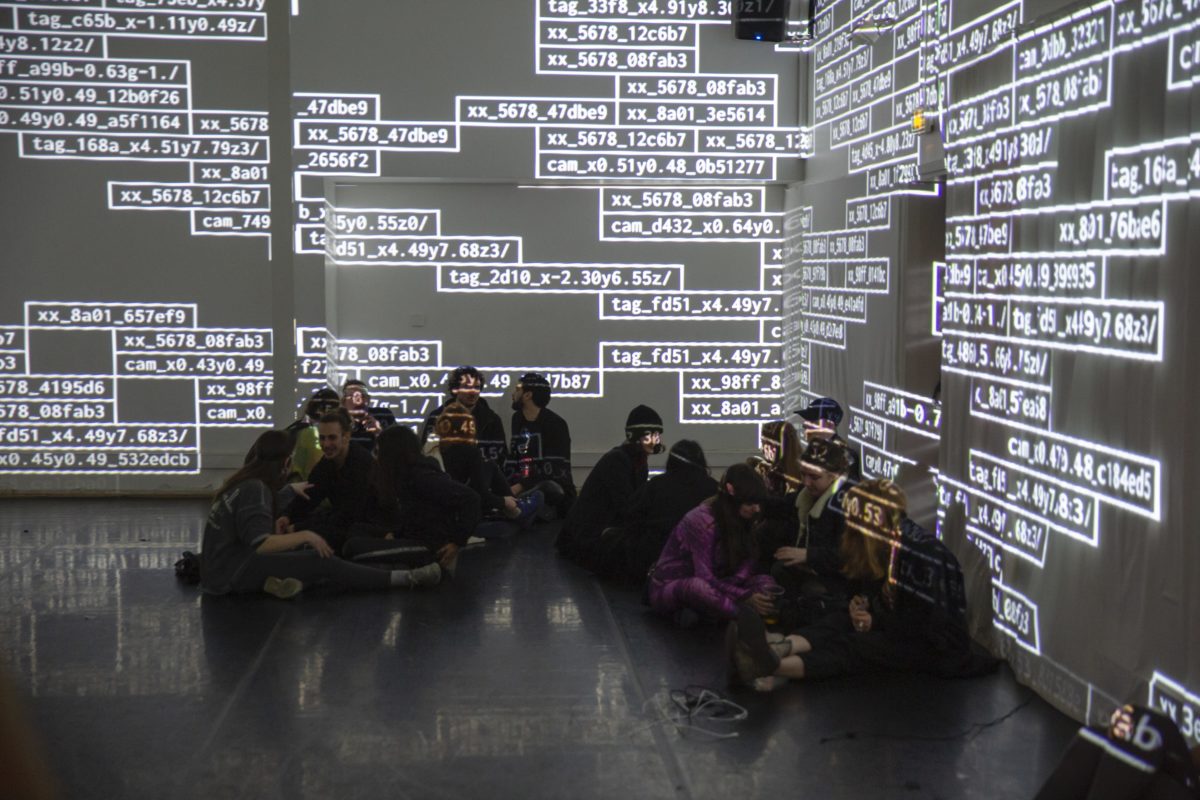
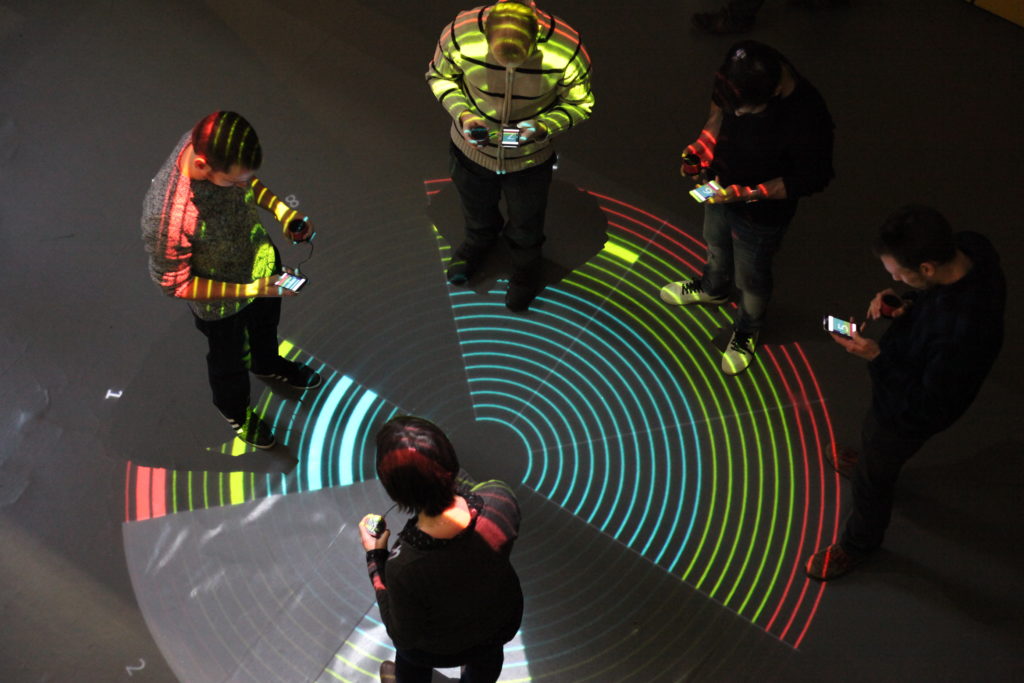
Comment et pourquoi expérimenter et créer, dans un même lieu physique, des dispositifs interactifs pour un grand nombre de personnes munies de supports mobiles et interactifs individuels (smartphones, tags, wearable computing, etc.) pour provoquer des interactions collectives, des formes de coopération émergentes ?

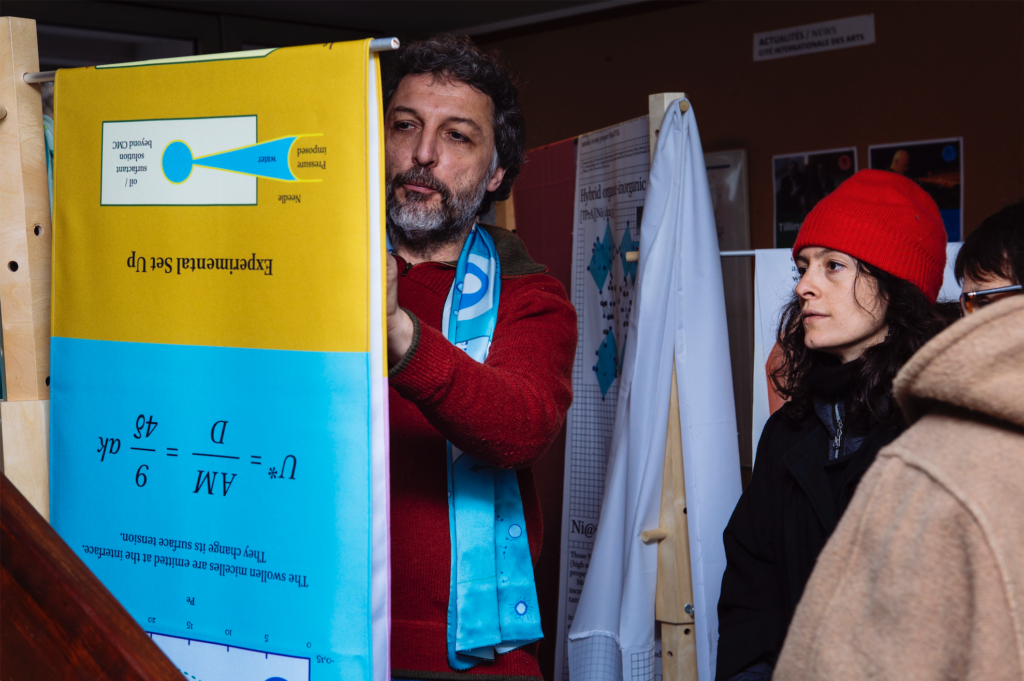
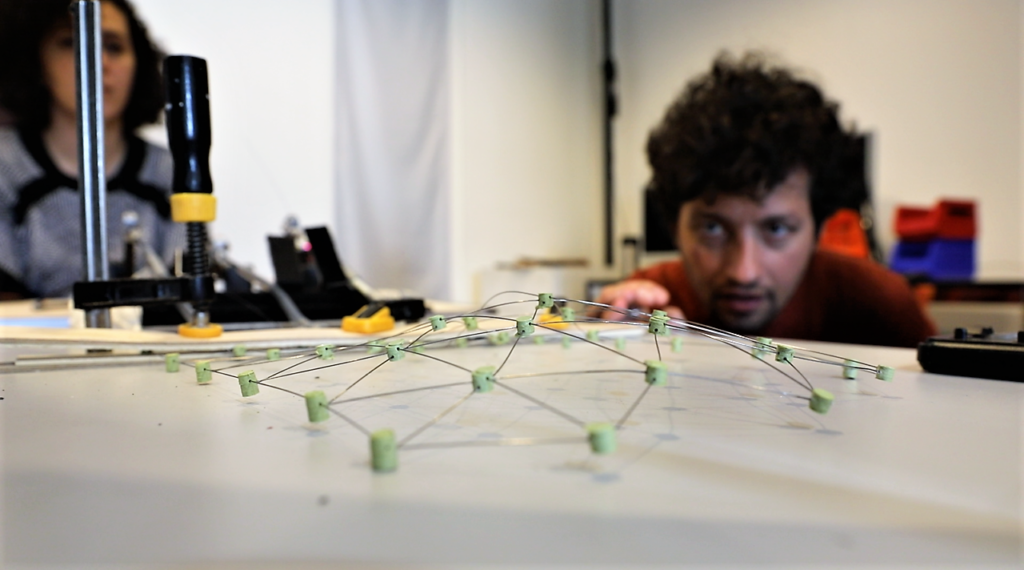
Cité internationale des arts, Paris, février 2018.
Photo : ©Christian Mamoun
Les installations interactives, jusqu’à la fin du XXème siècle, ont principalement fait appel à des participations individuelles ou sinon, plus rarement, pour un nombre de spectateurs agissant en petit nombre. En fort développement à partir des années 1990, les œuvres en réseau, ou tout au moins une part d’entre elles, ont quant à elles davantage misé sur l’engagement collectif. Mais, avec un tel système de communication distribuée, c’est une coopération à distance qui a toujours été privilégiée, via des ordinateurs ou périphériques personnels (PC). Et c’est ce même type de relations collectives ainsi médiées par des interfaces toujours plus individualisées qui est encore à l’œuvre avec les appareils mobiles, à l’instar de l’usage des « réseaux sociaux ».
Dès lors comment concevoir, expérimenter et créer des dispositifs situés stimulant des interactions collectives et même des coopérations émergentes, pour faire œuvre, dans un même lieu, à travers des expériences esthétiques actives et partagées ? Comment favoriser la coprésence autant que l’action commune ici et maintenant en déployant des installations spécifiques partagées tout en ayant recours avantageusement à des appareils mobiles individuels embarqués (smartphones, RFID, IoT, etc.) ? Ces configurations relationnelles complexes enchevêtrent ainsi différents types de médiations en même temps que des rapports directs entre les membres d’un public le plus souvent non-intentionnés et possiblement nombreux, pouvant aller jusqu’à des centaines voire des milliers de participants. Comment chacun peut-il alors s’inscrire à la fois dans un tel mouvement et s’y retrouver ? Comment l’interaction doit-elle être conçue pour se déployer autant en rapport au dispositif qu’entre les participants mêmes ? Comment penser des processus émergents autant que des formes de conduites voire de contrôle, des modes distribués autant que centralisés ? Comment concevoir de tels dispositifs qui mêlent nécessairement des dimensions artistiques, médiatiques, techniques et socio-politiques ?
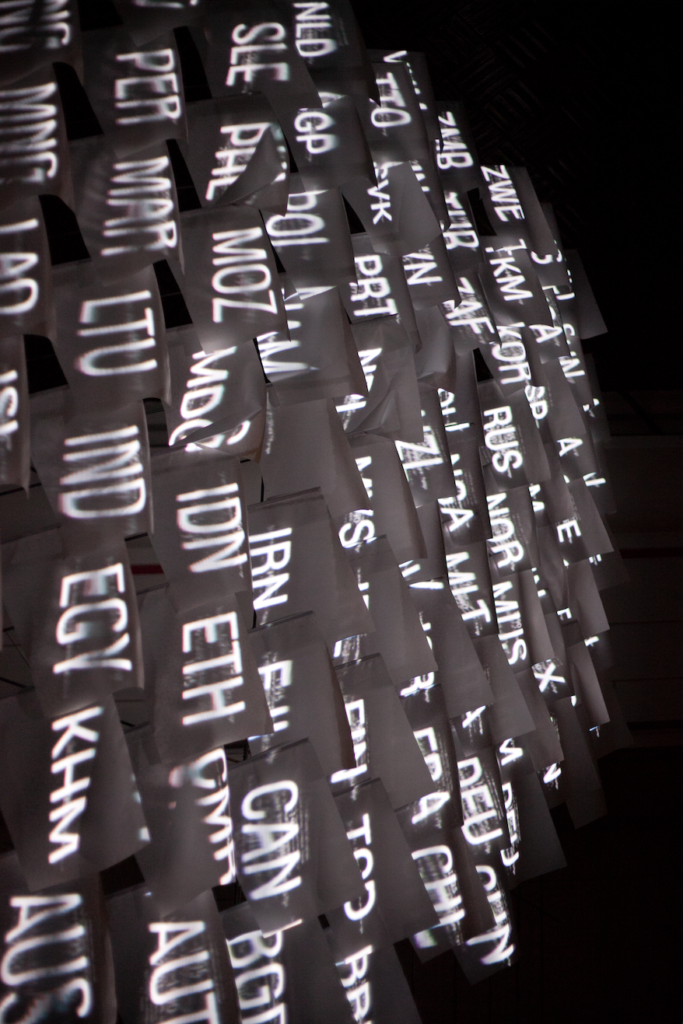
Encore rares aujourd’hui, ces configurations relationnelles complexes pourraient devenir de plus en plus courantes, en particulier dans les espaces publics ou semi-publics, comme les musées, les salles de spectacle, les halls de grandes institutions, les places publiques, les gares, les aéroports, les stades et même les cafés, restaurants, marchés et autres centres commerciaux.
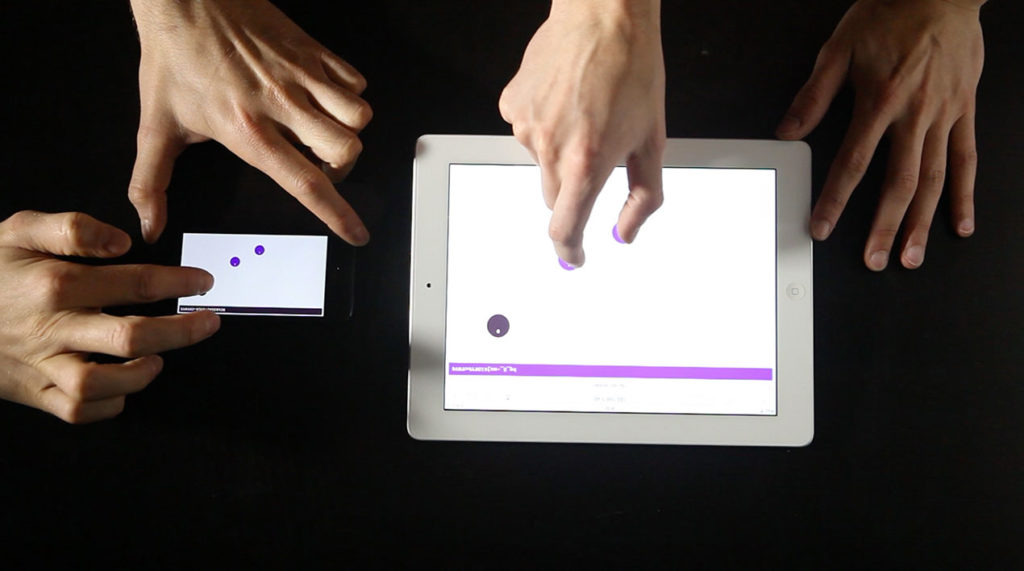
Pour réaliser et expérimenter de tels dispositifs, le groupe Reflective Interaction développe Mobilizing.js, un environnement de programmation pour les écrans mobiles à destination des artistes et des designers :