Samuel Bianchini, Câble robotisé, 2019
Réalisation robotique : la première version de ce projet a été réalisée par Léo Quénéhervé sous la direction de Kanty Rabenorosoa avec la collaboration d’Olivier Bienz et Didier Bouchon. Les améliorations de la version actuelle ont été effectuées par François Marionnet, Alexandre Mazel, Patrick Rougeot, Pierre Roux, Matthias Revol et Jérôme Saint-Clair. Ce projet est basé sur une première expérimentation de Yoann Duams, Thomas Gaulier, David Kristanek et Léo Quénéhervé sous la direction de Kanty Rabenorosoa.
Assistant à la scénographie : Corentin Loubet
Ce projet est élaboré dans le cadre du groupe de recherche Reflective Interaction d’EnsadLab (le laboratoire de l’École nationale supérieure des Arts Décoratifs, Université PSL, Paris) en partenariat avec l’École nationale supérieure de mécanique et des microtechniques (ENSMM), S.MART Franche-Comté, AS2M department / FEMTO-ST Institute avec le soutien de la Chaire Art & Sciences de l’École polytechnique, de l’École nationale supérieure des Arts Décoratifs – PSL et de la Fondation Daniel et Nina Carasso.
Remerciements à l’entreprise Euroflex, Pforzheim, Allemagne.
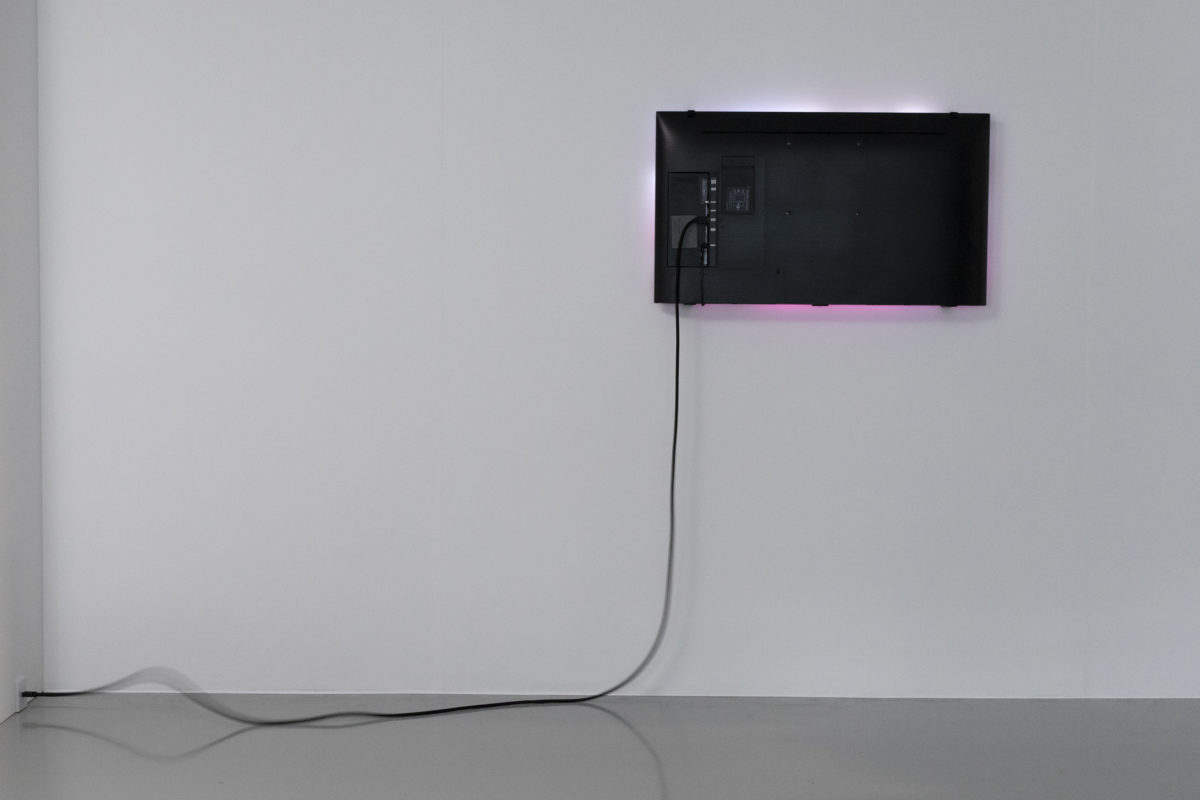



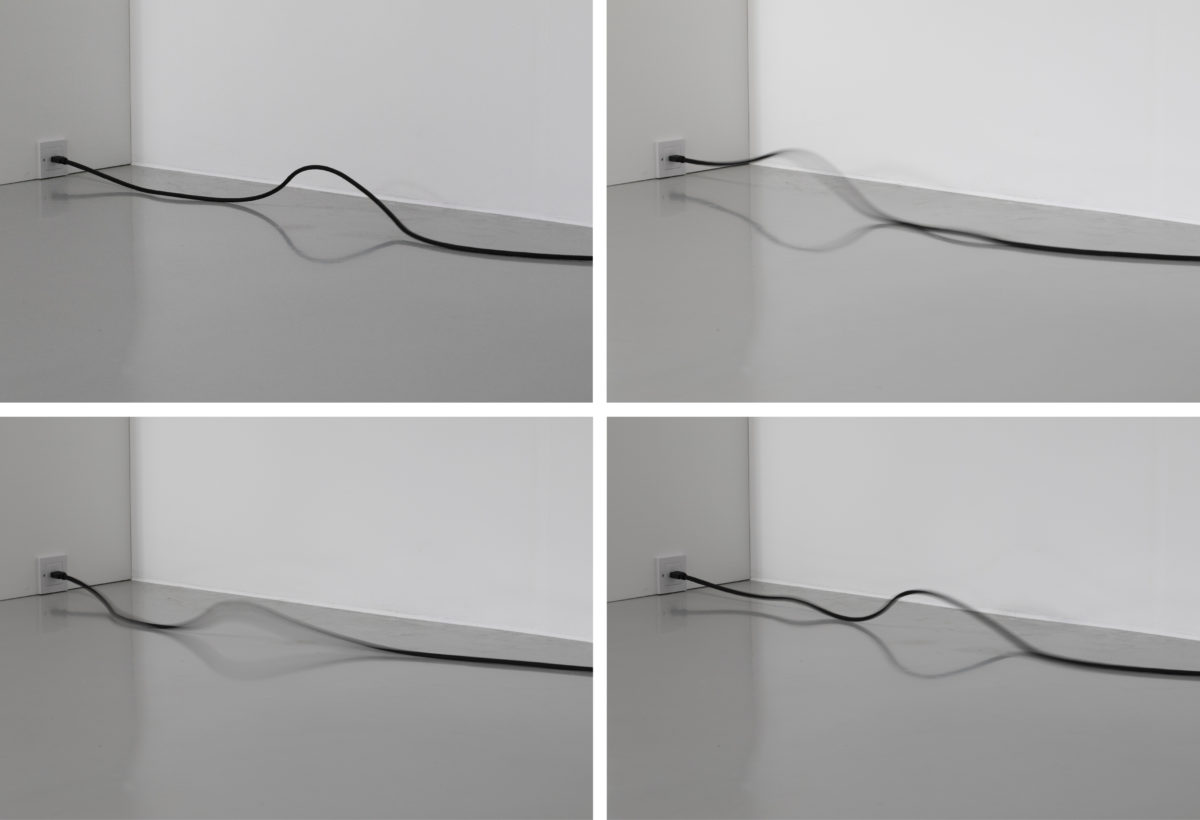

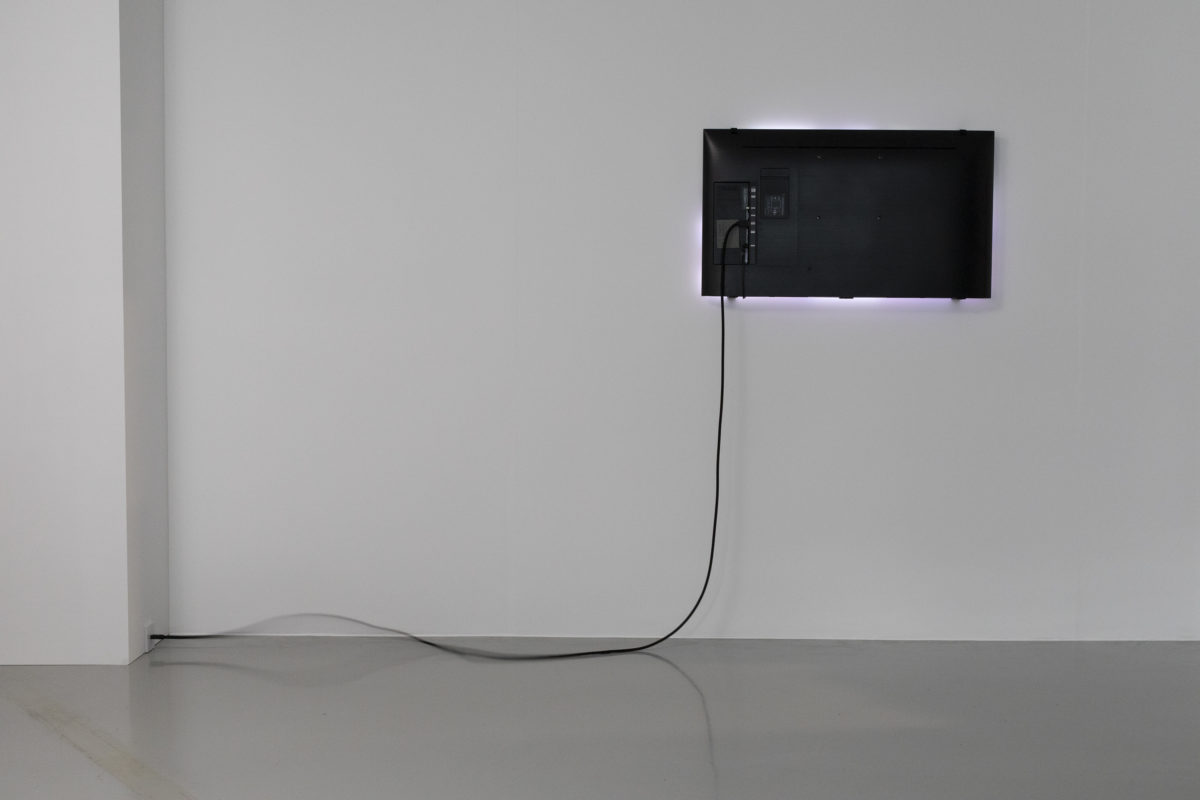
Comment le contenu d’un signal peut-il faire bouger le câble qui le transporte, comme dans le cas d’un dispositif de diffusion vidéo ? Comment ce que représente cette vidéo influerait-elle alors, dynamiquement, sur le mouvement du câble qui bouge, se tort, se débat, lentement ou par sursaut, tel un serpent pris dans un piège ?
Un écran plat est accroché face contre un mur. Il projette un halo de lumière et le câble l’alimentant en images est bien visible : il sort de l’angle de ce même mur, pour se tordre et bouger suivant l’image ainsi diffusée, celle d’une chaîne d’information en continu.
Si les industries de la communication, comme les penseurs de ce domaine, ont encore tendance à séparer les questions relatives au contenu de celles qui concernent les dispositifs qui y donnent accès, ici, il n’en est définitivement rien.