Samuel Bianchini, Robotic cable, 2019
Robotic realization: first version developed by Léo Quénéhervé with the advice of Kanty Rabenorosoa and the collaboration of Olivier Bienz and Didier Bouchon. The improvements of the current version were done by François Marionnet, Alexandre Mazel, Patrick Rougeot, Pierre Roux, Matthias Revol and Jérôme Saint-Clair. This project was based on a first robotic experiment developed by Yoann Dumas, Thomas Gaulier, David Kristanek and Léo Quénéhervé under the direction of Kanty Rabenorosoa.
Stage designer assistant: Corentin Loubet
Project developed in the framework of the Reflective Interaction Research Group of Ensadlab, laboratory of the École nationale supérieure des Arts Décoratifs (EnsAD–Université Paris Sciences et Lettres) in partnership with the École nationale supérieure de mécanique et des microtechniques (ENSMM), S.MART Franche-Comté, AS2M department / Joint Service of Mechanics / FEMTO-ST Institute with the support of the Chaire Arts & Sciences of the École polytechnique, the EnsAD – PSL and the Fondation Daniel et Nina Carasso.
Thanks to Euroflex company, Pforzheim, Germany
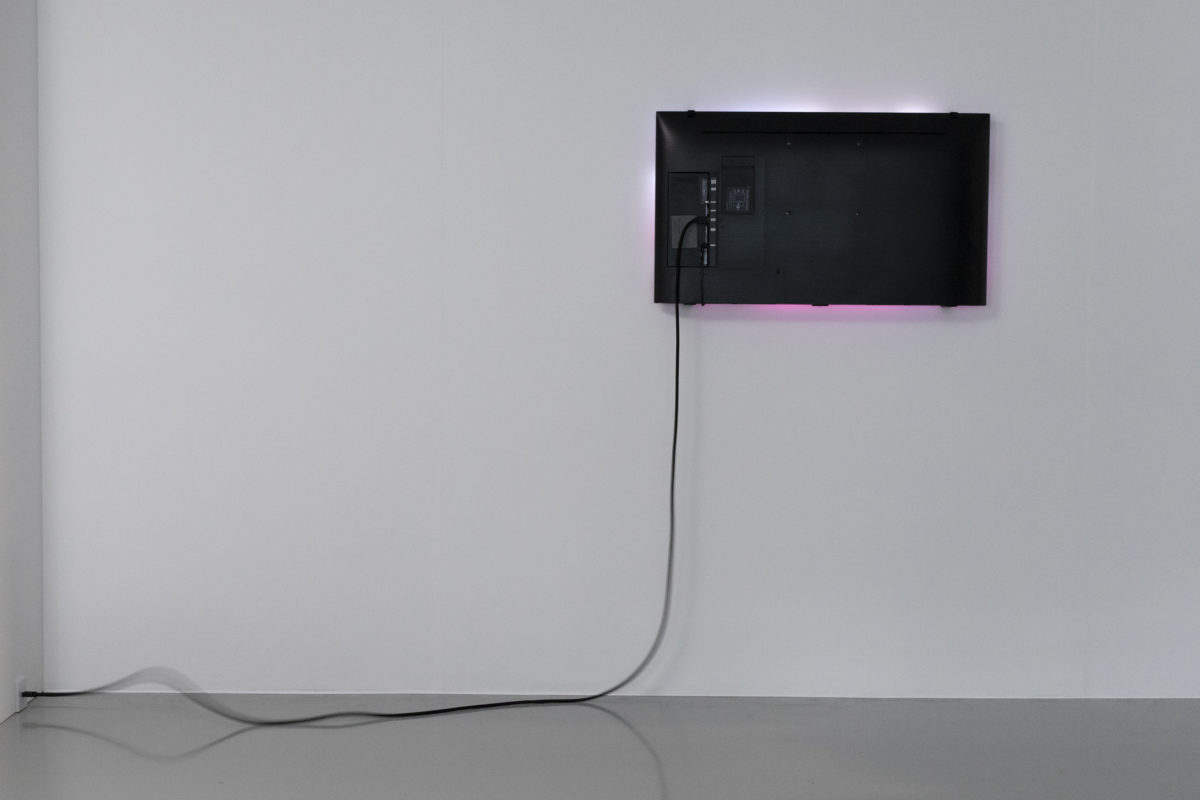



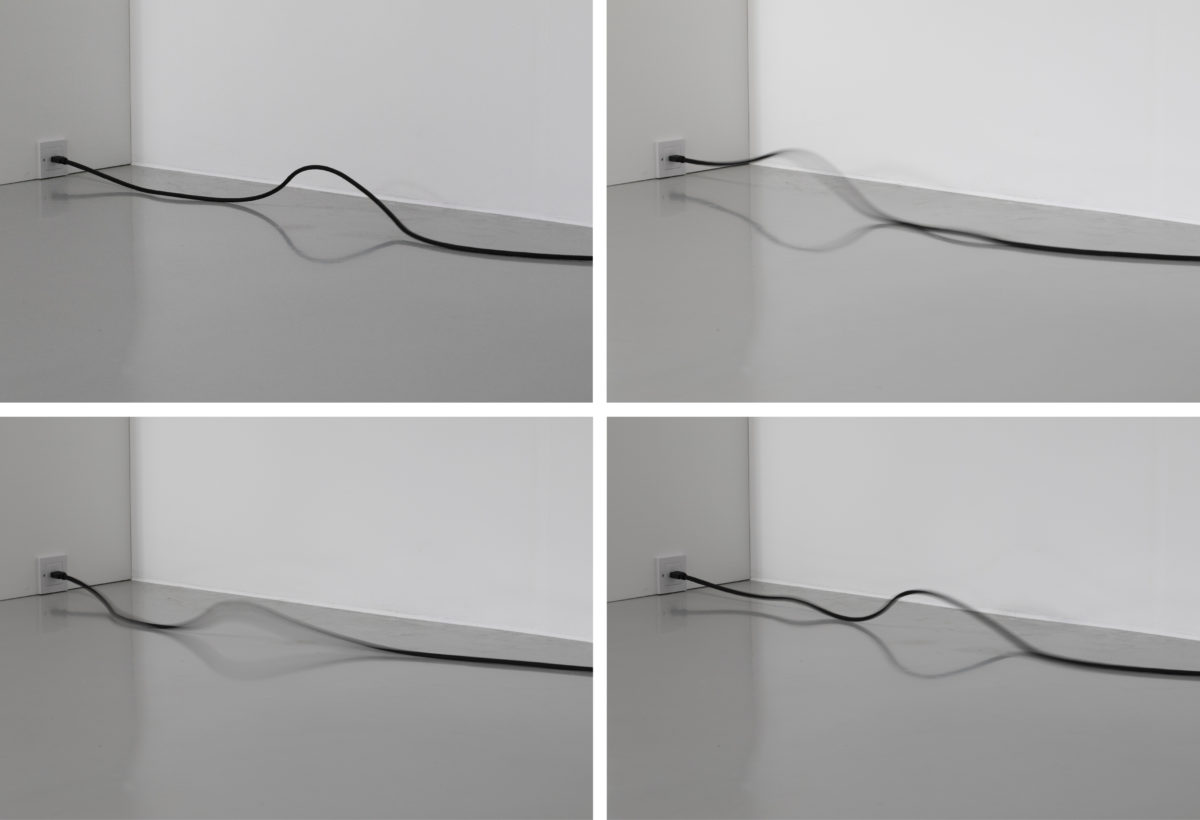

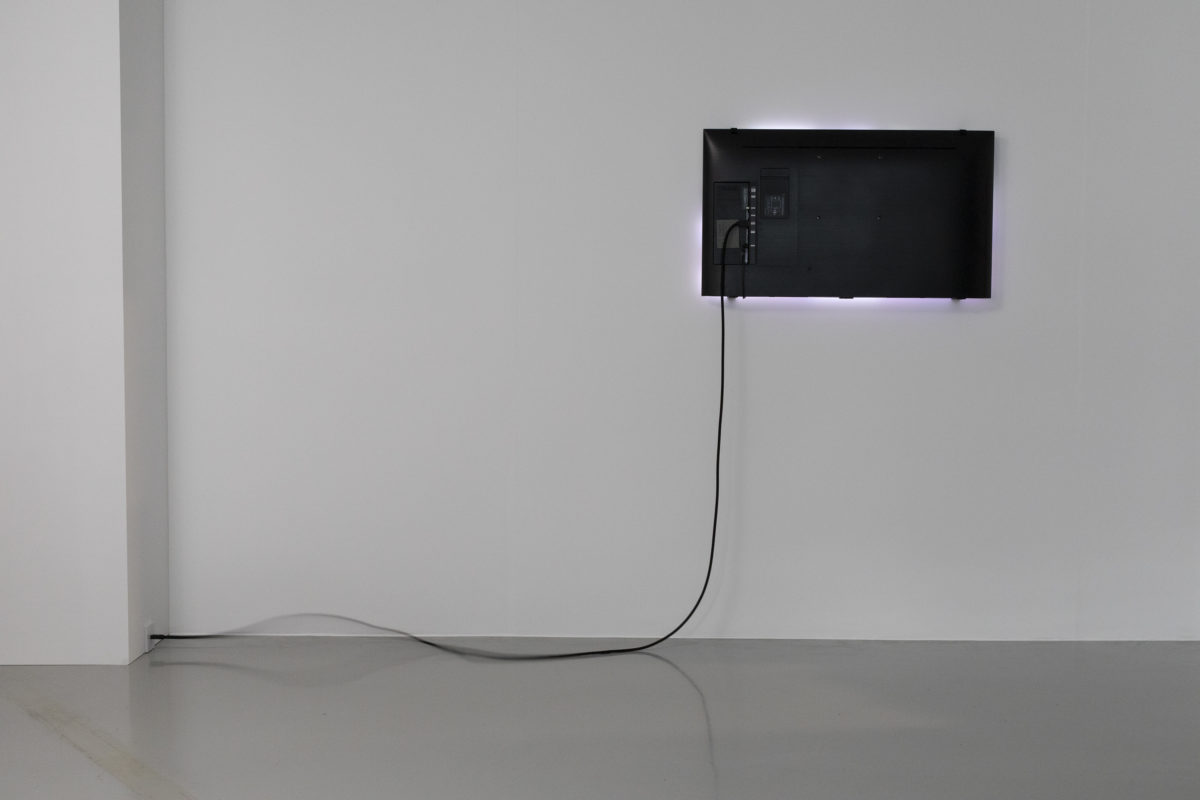
How can the content of a signal make the cable that carries it move, as in the case of a video broadcasting device? How would what this video represents then influence, dynamically, the movement of the cable which moves, tortures, struggles, slowly or by jumping, like a snake caught in a trap?
A flat screen is hung facing a wall. It projects a halo of light and the cable feeding it with images is clearly visible: it comes out of the angle of this same wall, to twist and move according to the image thus diffused, that of a continuous news channel.
If the communication industries, as well as the thinkers of this field, still tend to separate the questions relative to the content from those concerning the devices that give access to it, here, it is definitely not the case.