Real-time 3D capture and reconstruction software for interaction

About
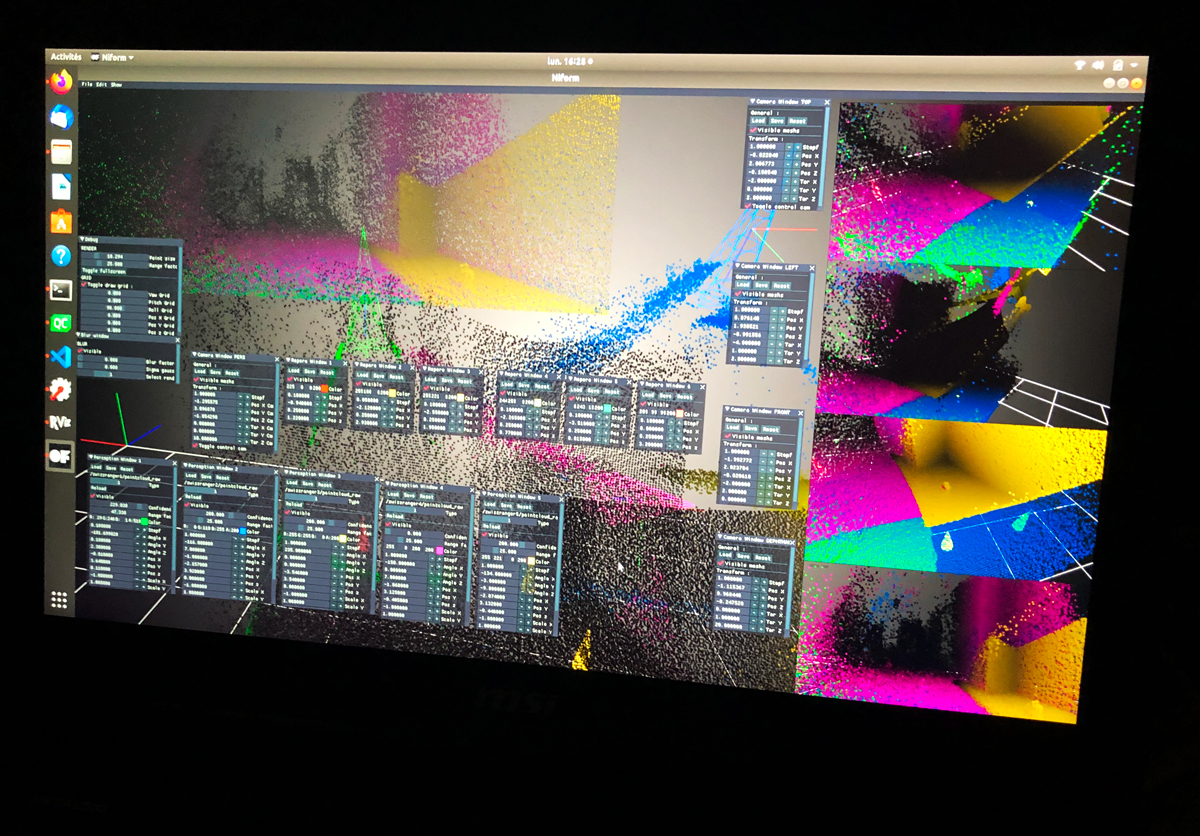
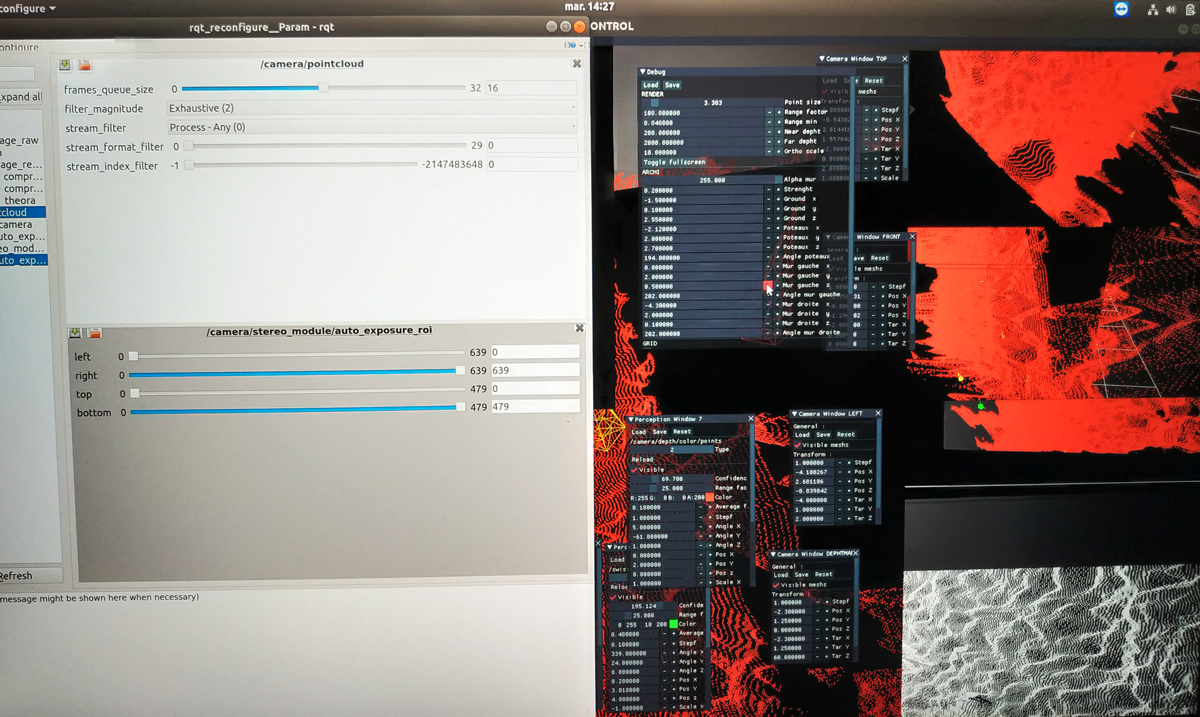
Zilhouette is a 3D multi-camera interaction software capable of managing a theoretically unlimited number of 3D streams. Zilhouette has been designed as a generic and modular tool to combine image depth or point cloud flows, to facilitate calibration and adjustments, and to generate volumetric output optimized for real-time interactions. Zilhouette is distributed under a free license GPL, tested on Ubuntu 18.
Caracteristics
· Theoretically unlimited number of 3D streams (apart from the computer power)
· ROS-compatible 3D streaming support (Robot Operating System)
· Rendering display to video output
· Filtering (CPU / Central Processor Unit, GPU / Graphical Processor Unit): architecture (addition of 3D model), temporal (motion blur, median, etc.), spatial (blur, median, erosion, dilatation, etc.), threshold (limiting angles, limiting distance, etc.), disparity, decimation, etc.
· OpenGl rendering with spellcam or perspective camera
· Real-time settings (ImGui): calibration, filtering, rendering settings, addition of streams, addition of model, multiple interactive view points, grid, etc.
· ROS-compatible camera: Realsense D400, SwissRanger SR4000, etc.
Zilhouette was originally created for the 2020 version of the “niform” installation of Samuel Bianchini displayed at Centre Georges Pompidou (Paris) for the Hors Pistes festival “Le peuple des images” – curatoring by Géraldine Gomez. These developments have been supported by EnsadLab, Ecole nationale supérieure des Arts Décoratifs research laboratory (EnsAD – Université PSL) and by la Chaire arts & sciences of Ecole polytechnique, EnsAD-PSL and Daniel et Nina Carasso’s foundation.
Website: zilhouette
Design and development: Colin Bouvry
Software license: GPL
Acknowledgements: EnsAD, Samuel Bianchini, Centre Pompidou, ROS, Openframeworks community.