A research & creation axis for the Reflective Interaction group of EnsadLab
How and why might we experiment and make non-figurative robotic objects, or networks of objects (IoT) that show forms of behavior, perhaps even personality, based on the way they move or interact with their environment?

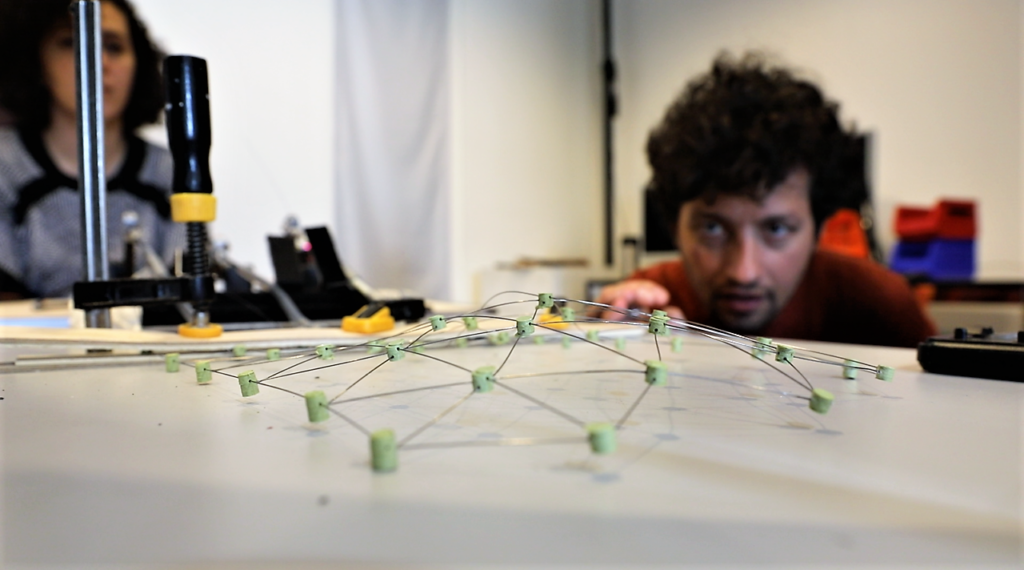
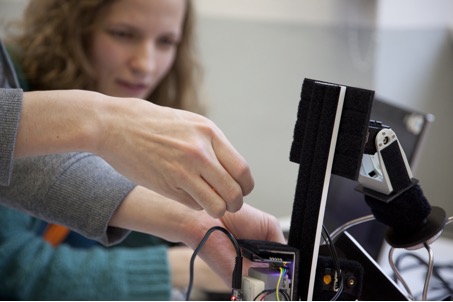
Photo: Amélie Caron
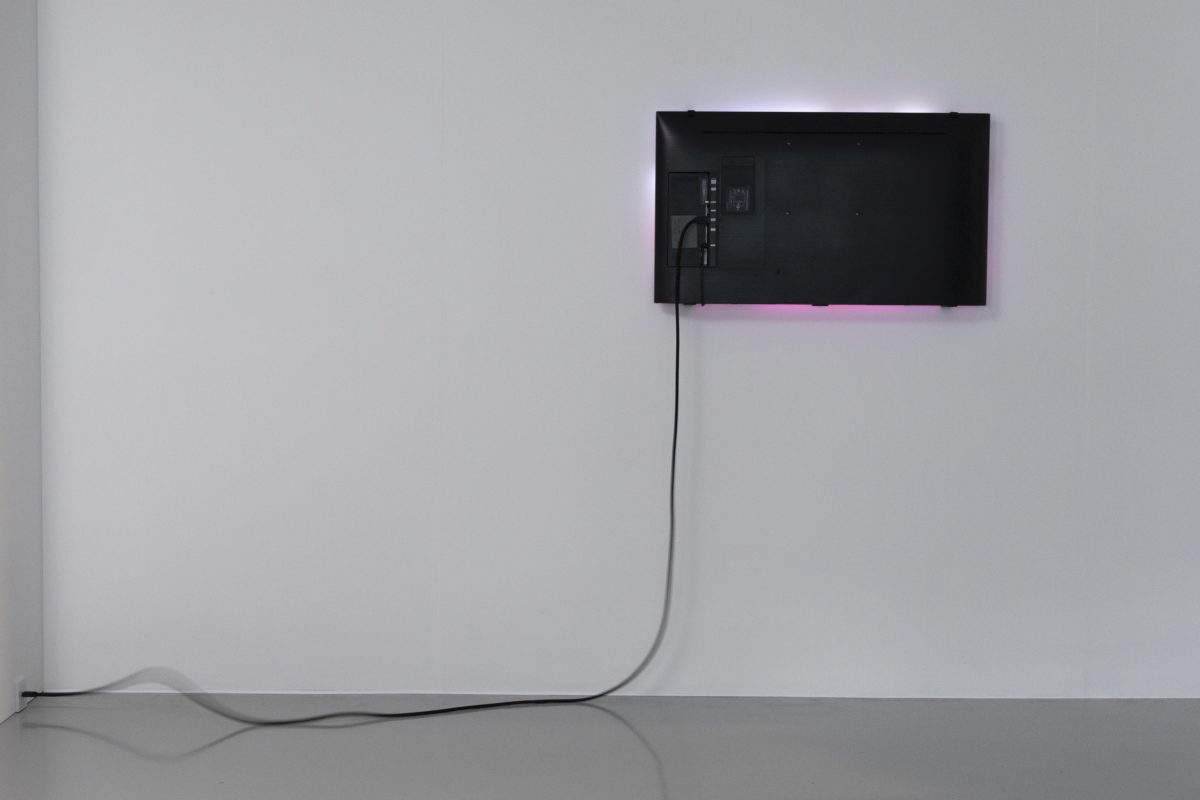
Objects can be robotized, thereby becoming able to move, act, and react to their environment, and seemingly acquiring degrees of autonomy, leading us to assign to them – even to non-figurative objects – traits of personality and behavior that induce sensitive or affective responses (emotion, empathy, etc.) as opposed to merely utilitarian ones. Non-anthropomorphic, non-zoomorphic and, more generally, non-biomorphic objects are particularly not expressive from their appearance, but they gain a form of vitality from their kinetic attributes and performances. These qualities ought to be investigated, define, formalized, implemented and experimented using a practical, reflective and multidisciplinary iterative methodology combining art, design, engineering (robotics), cognitive sciences and anthropology.
The robotic objects we create invite a perspective shift, compelling us to perceive the world through their “eyes” and “sensitivity”. Would it be possible for the object to change its status? To become a subject, or perhaps an agent, a quasi-object or quasi-subject? Beyond its utilitarian dimension, how can an object also be operative, symbolic and aesthetic? How to promote a dialogue between humans and objects initiated by the object? And if the object is to initiate a more affective than effective relationship, how can this connection be maintained and reiterated?
Robotics has been primarily about the integration of software and hardware; two technological fronts that are now undergoing considerable developments and innovation. While deep learning and other forms of artificial intelligence are profoundly changing the software used in robotics, the materiality of robots is equally rapidly changing, increasingly integrating soft materials (“soft robotics”) which can be combined with hard materials (tensegrity structures), thus generating new material qualities, movements and behaviors. By taking these advances into account, as well as by contributing to them, our research group investigates and reports on robotic objects’ possible ways of being and acting. Furthermore, these issues and approaches are not only considered in relation to individual objects; we also investigate the potentials for behavior in the networks of objects (IoT) that configure our social and natural environment.
To create the conceptual and practical conditions for prototyping, producing and studying behavioral objects, we brought together an interdisciplinary group of researcher-practitioners, where empirical and reflexive approaches come together, along six types of actions:
• 1
Construction of a “design space”: in close relation with our theoretical work, we propose a set of criteria and constraints along which to define and design behavioral objects;
• 2
Development of a modular robotics toolkit: the MisB KITis an open-source hardware and software kit available to different practitioners from expert developers to artists, designers, “makers”, to groups with no programming skills, including children;
• 3
Organization of workshops to implement, test, and create with both our “design space” and toolkit;
• 4
From the actions above, our approaches include the creation of behavioral objects of art and design, tested in public events with the public;
• 5
Study of movements and objects’ expressive qualities;
• 6
Organization of meetings and debates involving experts from several disciplines and, sometimes, the created objects;
• 7
Publication, including of a series of books on this topic of research: “Behavioral Objects” (year, Steinberg Press)