Un axe de recherche & création du groupe Reflective Interaction d’EnsadLab
Comment et pourquoi expérimenter et créer des objets robotisés non-figuratifs (ni anthropomorphes, ni zoomorphes) faisant preuve de comportements voire de personnalité, par leurs mouvements et/ou par leurs interactions avec leur environnement ?

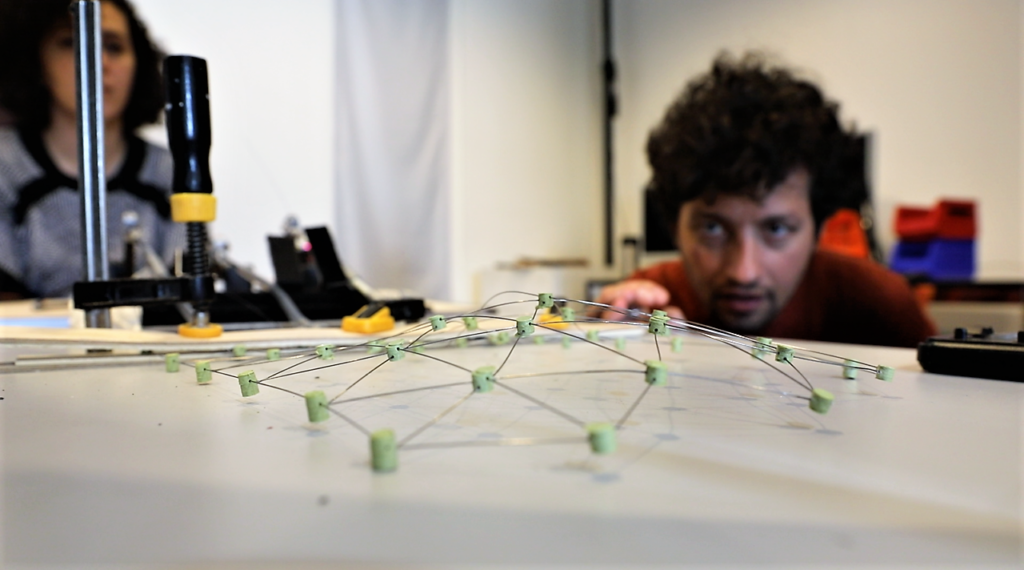
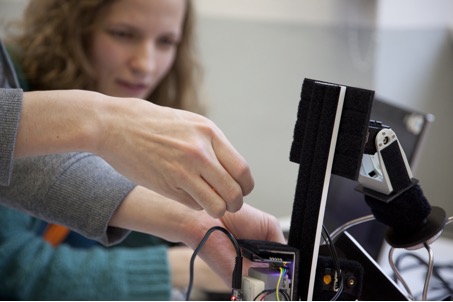
Photo : Amélie Caron
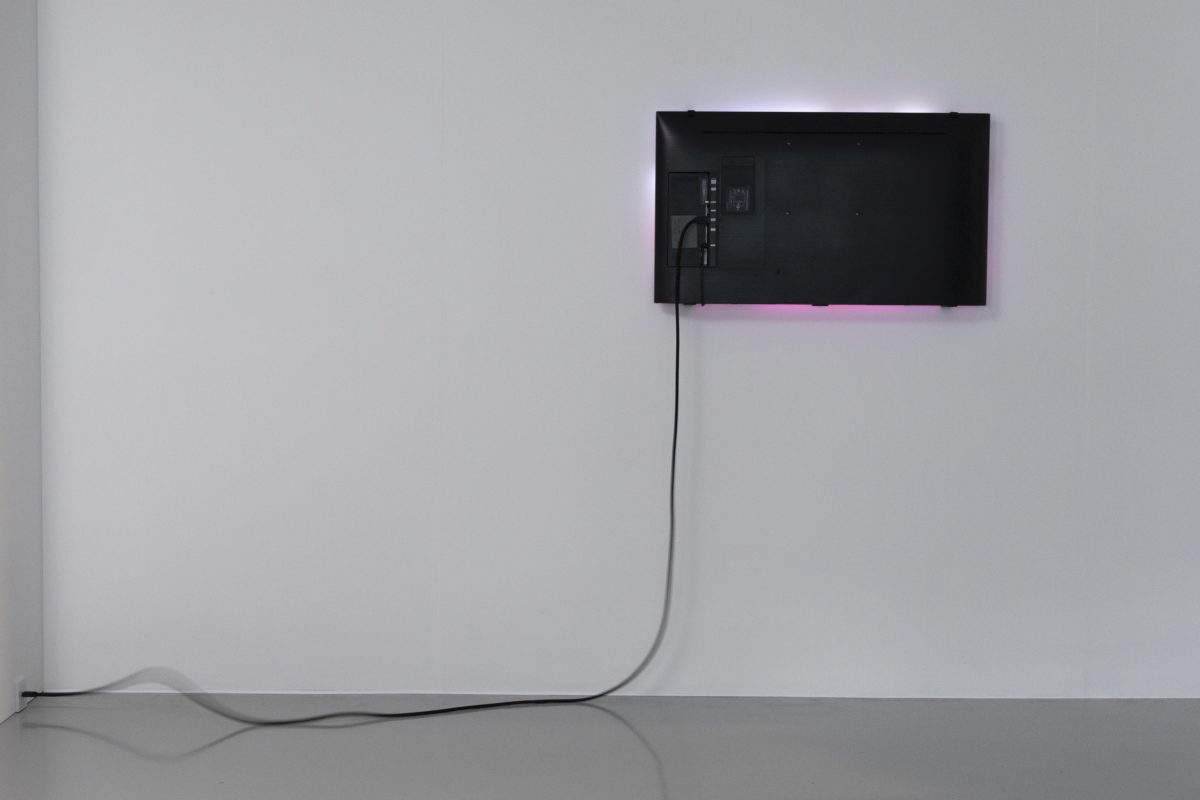
Si nous retenons l’hypothèse que bien des objets pourraient se voir robotisés, se dotant ainsi de capacité de mouvement, d’action, de réaction à leur environnement voire d’autonomie, comment et pourquoi attribuer à des objets non figuratifs une personnalité traduite par une dimension comportementale afin de stimuler une relation « homme/objet » d’abord basée sur relation sensible voire affective (émotion, empathie, etc.) plutôt que sur une finalité utilitaire ? Dans la mesure où ces objets robotisés non-anthropomorphiques, non-zoomorphiques et, plus largement, non-biomorphiques ne disposent pas a priori de capacités expressives par leur forme, comment leur attribuer un caractère comportemental, voire vivant, si ce n’est par leur animation c’est-à-dire leur qualité de mouvement qu’il s’agit alors de définir, étudier, formaliser, implémenter et expérimenter selon une méthodologie itérative à la fois pratique, réflexive et pluridisciplinaire alliant art, design, sciences de l’ingénieur (robotique), sciences cognitives et anthropologie.
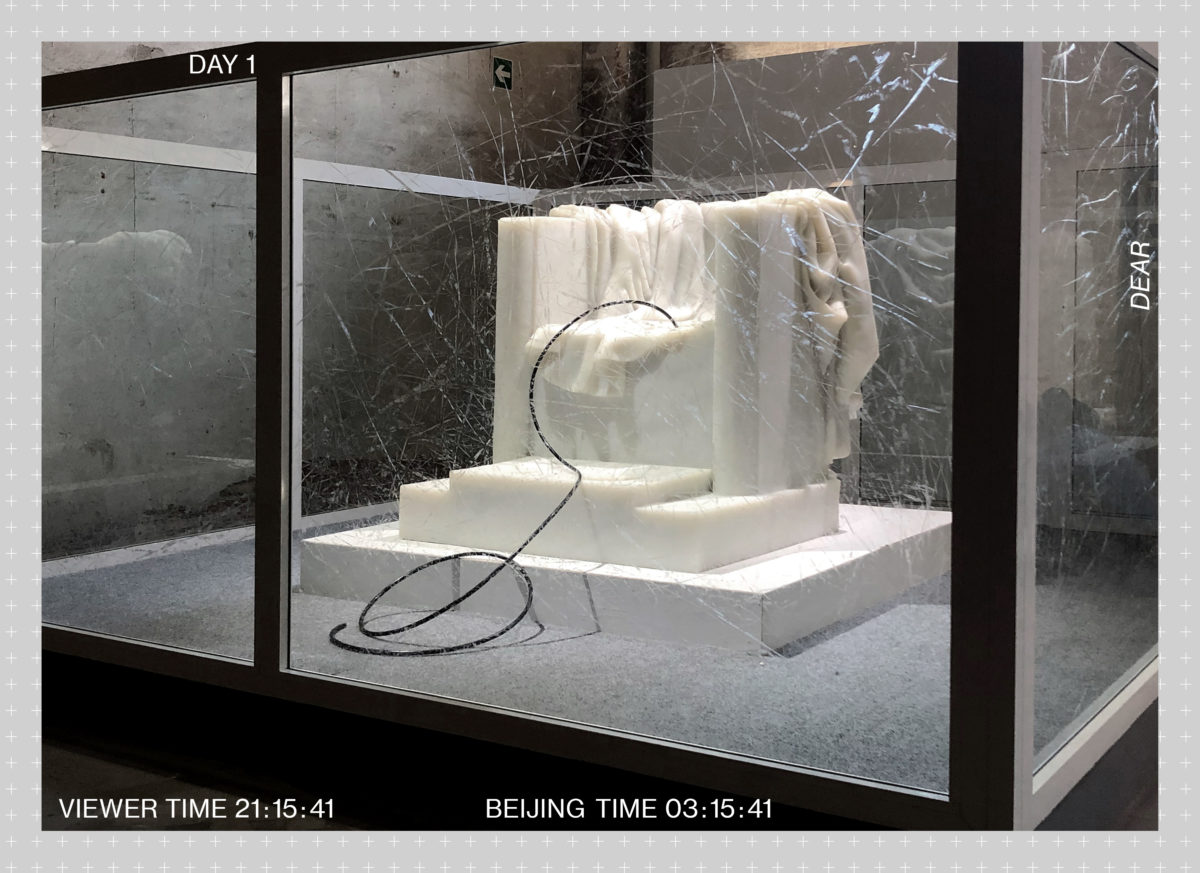
Dès lors, comment faire l’expérience d’un renversement de point de vue : comment tenter de percevoir le monde à travers « les yeux » et la « sensibilité » des objets ? L’objet pourrait-il alors changer de statut pour devenir sujet ou, tout au moins, agent ou encore quasi-objet ou quasi-sujet ? En deçà d’un caractère utilitaire, comment un objet peut-il instaurer une relation autant opératoire, symbolique qu’esthétique, qui vaut d’abord pour elle-même, une expérience rendue possible par un dialogue « objet/humain » dont l’objet serait à l’initiative ? Et si l’objet pouvait initier un rapport davantage affectif qu’effectif, comment ce rapport pourrait-il être maintenu et réitéré sans perdre de son intérêt ?
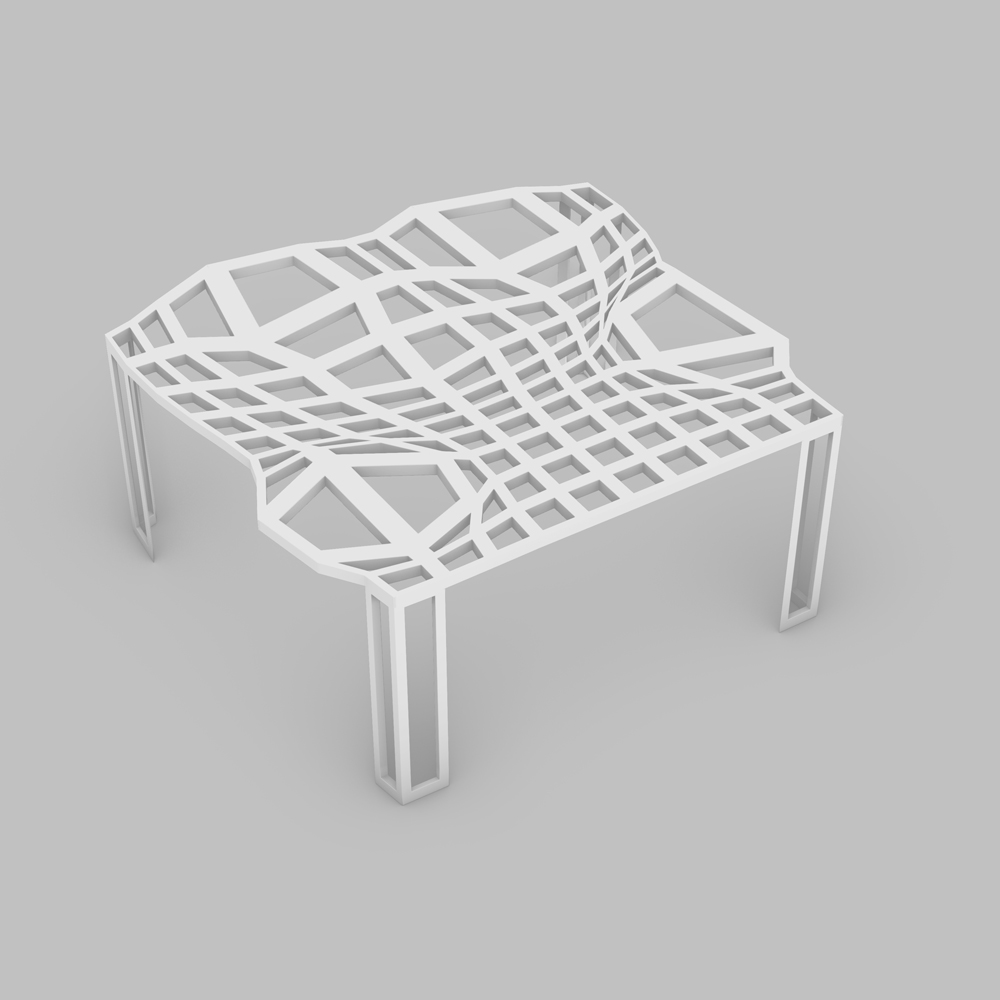
Si la robotique a été principalement fondée sur l’association soutenue des dimensions logicielles et matérielles, aujourd’hui, ces deux aspects de la robotique font l’objet d’intenses développements et innovations. D’une part, l’apprentissage profond (« deep learning ») et, au-delà, des formes d’intelligences dites « artificielles », concernent particulièrement le domaine logiciel de la robotique. D’autre part, la matérialité de la robotique est aussi en forte évolution, impliquant de plus en plus de matériaux souples ou mous (« soft robotic »), pouvant être conjugués aux durs (par exemple, avec des structures tensègres), et pouvant eux-mêmes, suivant leur structure et qualité, être vecteurs de comportements. Car en effet, ces avancées simultanées, logicielles et matérielles — que nous prenons en compte voire que nous développons — impactent particulièrement la manière d’être et d’agir de ces objets : leur comportement.
Enfin, si cet ensemble de questions et d’approches vaut pour ces objets, elles doivent désormais composer également avec des systèmes d’objets (IoT) parties prenantes de la configuration de nos environnements.
Pour créer les conditions conceptuelles et pratiques permettant le prototypage ou la réalisation, comme l’expérimentation ou l’étude de tels objets à comportements, nous développons des travaux de recherche pluridisciplinaires qui nous conduisent à adopter simultanément ou alternativement une démarche empirique et une approche réflexive soutenue par un travail historique et théorique, et cela, selon six types d’actions :
• 1
L’élaboration d’un « design space » : en relation étroite avec nos travaux théoriques, il s’agit ici de proposer un champ de critères et de contraintes qui doivent aider à définir et concevoir des objets à comportements ;
• 2
Le développement d’un toolkit — le MisB KIT — matériel et logiciel, de robotique modulaire, ouvert et appréhendable par différents publics : des praticiens non programmeurs (y compris des enfants), des artistes ou designers « makers », comme des experts développeurs ;
• 3
L’organisation de workshops permettant de mettre en œuvre et à l’épreuve notre design space et notre toolkit et de stimuler la création ;
• 4
À partir de ces différentes expérimentations, la création d’objets à comportements, en art et en design, eux-mêmes testés lors d’événements publics originaux ;
• 5
L’étude expérimentale de qualités expressives du mouvement ;
• 6
La mise en place de rencontres et débats impliquant des experts de plusieurs disciplines et, parfois, d’objets à comportements ;
• 7
La production de publications dont une série de livres sur le sujet — « Behavioral Objects » —, pour Sternberg Press.